1. Георадары серии "Лоза"
2. Первичная обработка георадарных сигналов (скачать в формате Word)
3. Распространение электромагнитных импульсов в подземной среде
(скачать в формате Word)
Копейкин В.В.
1. Введение.
Обычная радиолокация воздушных целей использует в качестве зондирующих импульсов радиоимпульсы, которые имеют несущую частоту и модулированы тем или иным способом. В георадиолокации подобный тип сигналов не может быть использован по причине сильного затухания радиоволн в подстилающей поверхности. Пространственный размер радиоимпульсов в обычных локаторах составляет единицы – сотни метров, а это максимальная глубина зондирования георадаров, обусловленная затуханием. Здесь не приходится говорить о временном разрешении объектов, поскольку отраженные от подземных объектов сигналы затухают раньше, чем успеет закончиться зондирующий импульс.
Для того, чтобы увеличить разрешение по времени, необходимо уменьшать огибающую радиоимпульса. С другой стороны, для того, чтобы увеличить глубину зондирования, необходимо понижать несущую частоту. Пределом этих тенденций и является сверхширокополосный импульс, имеющий от одного до нескольких колебаний тока (напряжения, напряженности электрического или магнитного поля – в зависимости от того, в какой части аппаратуры или среды он рассматривается).
В отечественной литературе такие импульсы иногда называют радиоимпульсами без несущей или видеоимпульсами. Последний термин пришел из обычной радиолокации, поскольку они по форме напоминают видеоимпульсы (продетектированные радиоимпульсы), используемые в каналах визуализации данных радиолокаторов.
В западной литературе такие сверхширокополосные импульсы называют « simple pulse ». Мы будем далее называть их просто зондирующими импульсами, имея в виду то, что другой тип сигнала в георадиолокации не применим.
В этой статье мы будем рассматривать способы оценки параметров сигналов, отраженных от подземных неоднородностей при зондировании видеоимпульсами. Мы назовем эту обработку первичной, поскольку она осуществляется по волновой функции отраженных сигналов, полученных в одной точке профиля.
2. Форма зондирующего импульса.
Для генерирования зондирующих импульсов в георадарах, как правило, используется так называемый «метод ударного возбуждения». В соответствии с этим методом до определенного напряжения заряжается конденсатор, который через ключевой элемент (обычно лавинный транзистор или разрядник) подключается непосредственно к передающей антенне. Передающая антенна (так же как и приемная) в общем случае является резонансной системой, имеющей собственную частоту и добротность, определяемую геометрией антенны (длиной, формой) и свойствами подстилающей поверхности. Как любая резонансная система, она может быть либо осциллирующей, либо апериодической, в зависимости от потерь энергии системы на радиоизлучение и тепло [1].
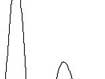
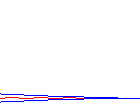
Если в георадарах используется антенны без дополнительной искусственной диссипации энергии, как это имеет место в большинстве приборов (например, антенны типа «бабочка»), то излучаемый такими антеннами сигнал имеет осциллирующий характер с затуханием. Форма подобного сигнала показана на рис.1
Рис.1 Осциллирующий импульс с затуханием. Функция пересекает нулевую ось многократно.
Причина осцилляций в том, что в обычных условиях (на почвах со среднестатистическими параметрами) эффективность излучения антенны и диссипация энергии на тепло не переводят резонансную антенную систему в апериодический режим. Поэтому функция импульса пересекает нулевую ось многократно, а теоретически - бесконечное число раз все с меньшей амплитудой, поскольку асимптотика этой функции
Здесь -

коэффициент затухания,

- собственная частота колебательной системы.
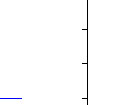
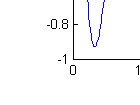
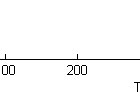
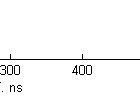
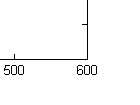
Для обеспечения апериодического режима излучения необходимо ввести в антенну дополнительную искусственную диссипацию энергии, как это сделано в резистивно-нагруженных диполях, иногда называемых по имени их разработчиков антеннами Ву-Кинга. Апериодический зондирующий импульс показан на рис.2.
Рис.2 Апериодический импульс. Функция пересекает нулевую ось один раз.
В апериодическом сигнале «хвост» асимптотически стремится к нулю, не пересекая оси. Асимптотика этой функции

Такая функция может считаться практически идеальной для зондирующего импульса георадара, учитывая ограничение частотной полосы снизу. По этой причине зондирующий импульс не может быть однополярным, поскольку в нем отсутствует нулевая частотная компонента (постоянная составляющая), для излучения которой нужна бесконечно длинная антенна.
Радарограммы, получаемые с помощью апериодического сигнала, обладают существенно лучшим качеством по разрешению, чем при осциллирующем сигнале, когда отражение от каждой границы сопровождается периодическими повторами (звоном). Однако использование апериодического сигнала связано с дополнительными потерями энергии, уменьшающими потенциал радара. Поэтому антенны Ву-Кинга могут использоваться в георадарах с большим потенциалом, когда возможно потратить часть энергетики прибора на повышение качества данных.
3. Форма отраженных сигналов.
Антенная система георадара, как правило, располагается непосредственно на поверхности земли. Отрыв антенн от поверхности на расстояние более нескольких сантиметров ведет к заметному ухудшению качества данных. Практически всегда справедливо правило: «чем ближе – тем лучше». По этой причине поверхностные слои почвы находятся в ближней зоне антенны и могут рассматриваться как часть самой антенны, формирующая ее основные характеристики: входное сопротивление, диаграмму направленности, частотный диапазон.
При перемещении радара по трассе прилежащие к антенне участки земли могут менять свою диэлектрическую проницаемость

и проводимость

, а это может приводить к изменению формы излучаемого зондирующего импульса. Например, слабо демпфированный резистивный диполь на влажной глине может излучать апериодический импульс, а на сухом песке – осциллирующий.
При отражении от границ зондирующий импульс меняет свою полярность, если волна переходит из среды с меньшей диэлектрической проницаемостью или проводимостью, в среду с большими значениями этих параметров, и не меняет полярности в противоположном случае. Форма отраженного импульса (например, его ширина) определяется дисперсией среды и шириной переходной зоны (границы) между слоями.
Из сказанного выше следует, что гарантировать стабильную форму зондирующего и отраженных импульсов нельзя, поскольку они формируются в значительной мере самой изучаемой средой. По этой причине основываться при обработке данных на какой-то определенной форме импульса (например, на его ширине или количестве осцилляций) нельзя, необходимо предусмотреть возможность вариаций его параметров.
Основная информация о среде заключена в амплитуде импульса, его полярности, времени задержки и ширине осцилляций. На амплитуду, полярность и время задержки влияет геометрическое размеры слоев и их параметры

,

, а на ширину осцилляций – ширина границы. Эти параметры могут быть оценены для большого класса функций, как осциллирующих, так и апериодических. Надежность оценок, тем не менее, будет зависеть от уровня шумов и конкретной функции импульса. При прочих равных условиях апериодические сигналы дадут более надежные оценки, чем осциллирующие.
Реальная радарограмма в общем случае состоит из суперпозиции многих отраженных знакопеременных сигналов, которые могут накладываться друг на друга. Если бы зондирующий импульс был «идеальным» однополярным, тогда обнаружение отраженных импульсов сводилось бы к поиску максимума модуля принятой реализации. При знакопеременной функции отличить по этому алгоритму сигнал, отраженный новым слоем, от «хвоста» предыдущего сигнала невозможно. Необходим некоторый инвариантный по отношению к различным функциям импульса способ обнаружения отраженных сигналов. Такой способ рассматривается ниже.
4. Обнаружение и оценка параметров отраженных сигналов.
За основу алгоритма обнаружения сверхширокополосных георадарных сигналов и определения их характеристик предлагается использовать преобразование Гильберта. Модуль преобразования Гильберта для зондирующих и отраженных георадарных импульсов довольно произвольной формы – гладкая аналитическая однополярная функция, имеющая только один максимум, поэтому обнаружение сигнала на временной оси сводится к поиску максимумов модуля преобразования. Полярность импульса определяется по значениям волновой функции в момент времени, соответствующий максимуму модуля.
Преобразование Гильберта от действительной функции

заключается в вычислении некоторой дополнительной функции

, у которой все спектральные компоненты имеют такой же модуль, но повернуты по фазе на

, т.е. преобразование реализует функцию идеального фазовращателя. Например, для функции

дополнительная функция

.
Преобразование Гильберта обычно представляют в комплексной форме

. В теории аналитических сигналов через модуль преобразования Гильберта

определяют огибающую импульса


(3)
В нашем случае дополнительная функция

имеет вполне определенный физический смысл – это «восстановленная» магнитная компонента электромагнитного импульса. Хотя мы и не регистрируем магнитную компоненту зондирующего импульса, по законам электродинамики она в радиоволне обязательно существует, причем ее спектральные компоненты, действительно, повернуты по фазе на

по отношению к электрической компоненте.
Таким образом, квадрат модуля преобразования Гильберта можно рассматривать как нормированную функцию плотности полной электромагнитной энергии зондирующего и отраженных импульсов.
Приведем ниже определение преобразования Гильберта для цифровой функции

при числе отсчетов

с шагом

через спектральную плотность

с шагом по частоте


(4)

(5)
Для определения полярности отраженных импульсов используется одно из свойств преобразования: максимум модуля

соответствует максимуму модуля

действительной знакопеременной функции [2]. Для максимума модуля преобразования Гильберта анализируется знак функции

в соответствующий момент времени. Знак функции соответствует полярности импульса.
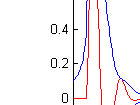
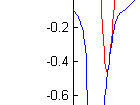
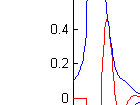
На рис.3 и 4 показаны осциллирующие знакопеременные импульсы одинаковой формы, но различной полярности и рассчитанный по формулам (4-5) модуль преобразования Гильберта (огибающая импульса), который имеет только один максимум, совпадающий с экстремумом импульса.
Сформулируем алгоритм первичной обработки георадарных данных на основе преобразования Гильберта.
4.1 Предварительная цифровая фильтрация (не обязательно).
4.2 Расчет преобразования Гильберта.
4.3 Поиск локальных максимумов модуля преобразования Гильберта.
4.4 Определение амплитуды и знака отраженных импульсов по волновой функции для моментов времени, соответствующим локальным максимумам преобразования.
Рис.3 Осциллирующий импульс положительной (по максимуму) полярности и модуль преобразования Гильберта.
Рис.4 Осциллирующий импульс отрицательной полярности и модуль преобразования Гильберта.
4.5 Определение ширины осцилляций по пересечению нуля слева и справа от обнаруженного экстремума отраженного импульса.
4. Заключение.
Кратко сформулируем основные выводы статьи по обсуждаемым вопросам.
а. Для георадиолокации из-за большого поглощения радиоволн в среде в качестве зондирующих импульсов могут использоваться только видеоимпульсы (радиоимпульсы без несущей).
б. Наилучшее качество данных обеспечивает апериодический зондирующий импульс. Для его излучения и приема необходимы антенны с дополнительной искусственной диссипацией энергии.
в. Специфика устройства георадаров и условия их эксплуатации не обеспечивают стабильности характеристик излученного и отраженных сигналов.
г. Для первичной обработки информации предложено использовать преобразование Гильберта, переводящее различные типы импульсов в инвариантную форму. Описанный алгоритм первичной обработки использован в программе «Силуэт».
В пакетах компьютерной обработки георадарной информации первичная обработка, как правило, не используется. Задача классификации отраженных импульсов решается по профилю (записи волновых функций при движении по трассе). Если слои не плоскопараллельные, то возникает возможность наблюдать интерференционную картинку и выделять «оси синфазности», которые интерпретируются как положение отражающих слоев. Но, как показывает практика, такое выделение плохо алгоритмизуется и в значительной мере зависит от опыта оператора.
5. Литература.
1. Горелик Г.С. Колебания и волны. – М.: ГИФМЛ, 1959. – 572 с.
2. Финк Л.М. Сигналы, помехи, ошибки. – М.: Радио и связь, 1984. – 256 с.
наверх