- Глубинный георадар.
Исследования геологической структуры подстилающей поверхности.
- Георадар в подводных археологических исследованиях.
- Разработка аппаратуры, методов обработки данных для электромагнитного подповерхностного
зондирования и опыт их применения.
- Модификации георадаров для морских подводных работ.
- Опыт применения георадиолокации в геофизике.
- "Смотрящие в глубину": Опыт использования отечественных сверхмощных импульсных георадаров серии "Лоза".
- Георадары «Лоза» для подповерхностного зондирования и их применение.
Разработка аппаратуры, методов обработки данных для электромагнитного подповерхностного зондирования и опыт их применения
А.Е. Резников, В.В. Копейкин, П.А. Морозов, А.Ю. Щекотов.
Москва, РАН. Успехи физических наук. №5, 2000 г.
1. Развитие радиофизических методов в геологии.
Теоретические основы
применения радиоволн для изучения геологических структур были
заложены Г.Лови и Г.Леймбахом в 1910 г., а в 1912 г. ими обоснована
возможность поисков руд и грунтовых вод радиоинтерференционными
методами. В нашей стране первые опытные работы электроразведочными
методами, использующими радиочастотные сигналы, начаты в 1925
г. А.А. Петровским [1].
В литературе мы не нашли однозначных указаний на то, кто первый предложил и использовал
радиолокационный метод в геофизике, поэтому мы будем придерживаться
лишь одной из версий первоначального развития событий, изложенной
в [1].
Эффект отражения импульсных электромагнитных волн от подповерхностных неоднородностей
был случайно обнаружен А. Уэйтом в 1957 г. на ледовом аэродроме
в Антарктиде, когда он обратил внимание на то, что радиовысотомер
самолета показывал высоту 900 футов еще до момента его отрыва
от взлетной полосы. Первоначальное предположение о неисправности
высотомера, который представлял собой импульсный радиолокатор,
не оправдалось, а выяснилось, что локатор фиксирует сигнал от
подножья ледника. Дальнейшие эксперименты показали, что используя
импульсный радиолокатор, можно определять толщину льда как с его
поверхности, так и с воздуха [2].
Использование стандартной локационной аппаратуры в геофизике оказалось возможным в ограниченном
числе случаев, когда затухание радиоволн в среде мало, например,
для зондирования сухих песчаников, известняков и каменной соли.
Для подавляющего большинства земных пород затухание радиоволн
очень велико и для обычных локаторов время прихода отраженных
сигналов оказывается столь малым, что они накладываются на зондирующий
импульс и не могут быть зарегистрированы [3].
Для увеличения разрешения и потенциала локатора предпринимались попытки использовать широкополосные
сигналы с линейной частотной модуляцией или шумоподобные с фазовой
модуляцией. Хотя такие попытки продолжаются до сих пор, локаторы,
основанные на этом принципе, не дают удовлетворительного разрешения
подземных неоднородностей, поскольку база сигнала в большинстве
практических случаев оказывается больше, чем время распространения
волны от отдельных неоднородностей. Это приводит к тому, что на
выходе устройства обработки соседние сигналы плохо разрешаются.
Выход из положения был найден тогда, когда вместо обычного радиолокационного импульса
с высокочастотным заполнением стали применять импульс без несущей,
который называют моноимпульсом или видеоимпульсом. Такой импульс
представляет собой одно или несколько колебаний тока в антенне
и имеет относительную полосу спектра, близкую к единице. Моноимпульсный
сигнал обладает наилучшими характеристиками для георадара, поскольку
обеспечивает максимальную глубину зондирования и максимальное
разрешение. Это есть предельный случай трансформации обычного
радиоимпульса, когда мы начинаем снижать частоту несущей, чтобы
увеличить глубину зондирования, и одновременно уменьшать длительность
огибающей, чтобы увеличить разрешающую способность.
Способ формирования
видеоимпульса был предложен в 1960 г. И.К. Куком и до сих пор
используется в георадарах. В этом способе, который получил название
"метода ударного возбуждения антенны", на передающую антенну подается
перепад напряжения который и формирует видеоимпульс [4].
В настоящее время
во многих странах, таких как США, Япония, Канада и Швеция разрабатываются
и выпускаются малыми партиями различные модификации георадаров.
В бывшем Советском Союзе этой тематикой занималась кафедра радиолокации
Рижского института инженеров гражданской авиации под руководством
М.И. Финкельштейна.
Частотный диапазон георадаров обычно лежит в пределах 50-500 МГц, что является компромиссом
между глубиной зондирования в единицы - десятки метров и разрешающей
способностью в единицы - десятки сантиметров для реальных геологических
структур. Получили развитие и более высокочастотные радары, имеющие
верхнюю частоту до 40 ГГц, которые имеют глубину зондирования
в единицы - десятки сантиметров и используются, в основном, для
анализа состояния бетонных строительных конструкций, и которые
трудно отнести к геологическим приборам.
Технические характеристики практически всех георадаров, так и их схемные решения мало чем
отличаются друг от друга. За основу технического решения принят
метод стробоскопического преобразования спектра сигнала в область
низких частот, в которой и происходит его регистрация. Ударное
возбуждение антенны осуществляется транзисторами в лавинном режиме
с перепадом напряжения около 50 Вольт.
Основные технические проблемы, связанные с таким схемным решением - это сложность обеспечения
большого динамического диапазона, постоянства амплитудно-частотной
и линейности фазо-частотной характеристики стробоскопического
преобразования в приемном тракте, что приводит к паразитным колебаниям
("звону") сигнала и маскировке слабых сигналов более сильными.
"Звон" приемного тракта является основной причиной малого реального
потенциала радаров, который обычно составляет 40 - 50 дБ. (Под
реальным потенциалом мы понимаем то ослабление сигнала в среде,
при котором радар способен обнаруживать подземные объекты. Отметим,
что довольно часто в описаниях георадаров приводят значение его
потенциала, вычисленное как отношение мощности передатчика к чувствительности
приемника, который не позволяет оценить реальные возможности прибора)
При наличии "звона" естественный способ увеличения реального потенциала - увеличение
мощности передатчика или увеличении чувствительности приемника
(например, введением накопления сигнала) не приводят к успеху,
поскольку паразитные колебания так же усиливаются.
В последнее время в США и Австралии ведутся работы по созданию нового типа георадаров
с частотным сканированием. Побудительным мотивом этих работ явилась
попытка избежать "звона" сигнала в приемном тракте. В этой схеме
локатор работает последовательно на сетке частот и регистрирует
спектр сигнала. После этого спектр нормируется на предварительно
снятую частотную характеристику приемного тракта и преобразуется
во временную область. Этот прием очень хорошо очищает сигналы
от "звона", однако поднять реальный потенциал локатора пока не
удается, поскольку возникает новая проблема - регистрация слабого
отраженного сигнала на фоне непрерывно работающего рядом собственного
передатчика.
2. Георадары серии "Грот".
Впервые с проблематикой подповерхностного радиолокационного зондирования мы столкнулись
в 1990 г., когда приняли участие в конкурсе на разработку бортового
радиолокатора марсохода в космической программе "Марс-94" [5].
Основной задачей этого локатора являлось обнаружение на глубине
до 500 метров под марсианской поверхностью замерзшей воды. Для
того, чтобы обеспечить необходимые параметры обнаружения объекта,
нам пришлось разработать малогабаритный передатчик с импульсной
мощностью 1 мегаватт. Он представлял собой современную версию
искровых передатчиков времен А.С. Попова и Г. Маркони, применявшихся
в первых опытах по радиосвязи.
После отмены программы "Марс-94" мы решили использовать опыт проектирования марсианского
локатора для разработки наземных георадаров серии "Грот". К этому
нас подтолкнуло знакомство с работой в реальных условиях Подмосковья
георадаров отечественного и зарубежного производства. Мы пришли
к выводу, что эти приборы на практике не работоспособны на глинистых
почвах, характерных для Подмосковья. Они могут обеспечить глубину
зондирования в несколько метров только на слабопоглощающих радиоволны
грунтах, по своим параметрам близким к сухому песку, что делает
их малоперспективными для средней полосы России.
Основная задача, которую мы ставили перед собой при проектировании георадаров серии
"Грот" - это достижение максимально возможного реального потенциала
прибора.
Эта цель достигается двумя основными способами - использованием мощного передатчика
и регистрацией сигнала в его собственном спектре частот, без стробоскопического
преобразования сигнала в область низких частот. Другими словами,
мы исключили большинство операций над сигналом, которые могут
приводить к возникновению "звона" [6].
Примененный нами способ регистрации основан на использовании быстродействующих
компараторов, которые сравнивают приходящий сигнал с некоторым
заданным порогом. Изменяя величину порога и коэффициент усиления
приемника, можно регистрировать сигнал в большом диапазоне его
значений. Если при стробоскопическом способе за один излученный
импульс передатчика регистрируется значение амплитуды сигнала
в один момент времени, то в использованном нами способе за один
импульс фиксируется моменты превышения сигналом порога по всей
временной координате.
В процессе отработки прибора нам пришлось кардинально пересмотреть свои представления
о возможностях использования различных типов антенн при большом
реальном потенциале локатора. Из известной нам литературы следовало,
что чаще всего в георадарах используется антенна типа "бабочка",
которая достаточно широкополосна и не вызывает заметного "звона"
сигнала.
Мы убедились, что в нашем случае "звон" "бабочки" существенно искажает сигнал и
понижает реальный потенциал радара.
Наиболее подходящей антенной оказался резистивно-нагруженный диполь, в котором часть
энергии импульса поглощается на распределенных вдоль его плечей
резисторах. Подбирая величину резисторов, можно обеспечить практически
полное демпфирование паразитных колебаний импульса.
Резистивно-нагруженный диполь используется нами как основная антенна при полевых работах
и как основной элемент направленной антенны при работе в условиях
города, где большое количество активных и пассивных внешних помех.
Экспериментальная проверка ни одной из известных нам конструкций направленных георадарных
антенн, опубликованных в научной, технической и патентной печати
не дала положительных результатов, поскольку все они основаны
на переотражении воздушной волны металлическим экраном. Любой
металлический предмет, соизмеримый с длиной волны, каковым является
экран, резонирует, маскируя слабый принимаемый сигнал.
Оптимальной конструкцией направленной антенны оказалась "безэховая камера" без металлических
деталей. Она представляет собой резистивно-нагруженый диполь,
накрытый диэлектрическим ящиком, заполненным углеродным радиопоглотителем,
который поглощающает воздушную волну.
Приведем основные технические характеристики георадара "Грот-7".
- Диапазон рабочих частот 30 - 500 МГц.
- Импульсное напряжение на выходе передатчика 5 кВ.
- Чувствительность приемника 75 мкВ.
- Частота дискретизации данных 1 нс.
- Потребление от аккумулятора 12 В в режиме регистрации 2 А, в режиме просмотра 0.5 А.
- Вес 10 кг.
Радар оснащен жидкокристаллическим индикатором 128 Х 256 элементов и имеет встроенную память объемом
4 МБ. Он может работать автономно, т.е. в режиме регистрации с
выводом информации на индикатор с последующей (в случае необходимости)
перекачкой информации в компьютер по стыку RS-232, а так же в
составе с компьютером типа "Notebook".
Измерение реального потенциала георадаров "Грот" осуществлялось следующим образом.
Георадар ставился на пенопластовые поплавки и с помощью лодки
перемещался от берега к центру достаточно глубокого водоема. В
процессе движения фиксировалась глубина, на которой отражение
от дна исчезало из-за поглощения радиоволн водой. По записям амплитудной
функции определялось погонное затухание как отношение изменения
амплитуды к разности глубин. Реальный потенциал определялся как
произведение погонного затухания на глубину, на которой сигнал
пропал.
Для георадаров серии "Грот" измеренный реальный потенциал составляет величину не менее
120 дБ.
3. Методы обработки данных.
На получаемых с помощью георадаров "Грот" радарограммах практически отсутствуют
паразитные колебания - "звон" аппаратуры, характерный для остальных
георадаров. По этой причине мы не пользуемся стандартными программами
обработки георадарных сигналов, основная задача которых уменьшить
величину "звона" и выделить на его фоне сигнал с помощью разного
рода фильтраций.
В целом ряде задач, где не требуется точное знание глубин залегания объектов или слоев,
например при поиске положения на местности трубопровода, радарограмма
не нуждается в обработке и является конечным продуктом. Такого
типа задачи решаются прямо на месте по изображению на экране радара.
Глубина может быть оценена по задержке сигнала и средней скорости
распространения радиоволны для зондируемой среды, которая для
Подмосковья, как правило, в три раза меньше скорости света.
Однако чаще всего потребителя интересует геологическое сечение трассы с точным указанием
глубин залегания объектов и слоев. Принятый нами в настоящее время
способ восстановления геологического профиля по радарограмме основывается
на использовании методики, которая известна в сейсмологии под
названием "общий пункт возбуждения" (ОПВ).
Первоначально мы снимаем радиолокационный профиль, перемещаясь по трассе с прибором,
в котором расстояние между приемной и передающей антенной фиксированы.
По радарограмме определяются точки, в которых необходимо произвести
зондирование т.е. в соответствии с методом ОПВ получить годографы
от слоев и объектов. Годограф - это функция задержки сигнала от
слоя (объекта) в зависимости от расстояния между приемной и передающей
антеннами при симметричном разносе их в разные стороны.
Годограф позволяет определить как истинную глубину слоя, так и скорость распространения
волны в нем . Для того, чтобы преобразовать радарограмму в геологическое
сечение, необходимо исключить кратные отражения от слоев и трансформировать
временную ось в пространственную, задавая скорость волны в слое.
Вся необходимая для этого информация может быть получена из годографа.
Процесс вычисления характеристик среды по годографу, а так же получение геологического
сечения автоматизировано, однако основную роль в этом процессе
играет оператор.
Использование квазисейсмического подхода для получения геологического сечения не может считаться
удовлетворительным, поскольку не используется часть информации,
заключенная в амплитуде сигнала, его временной форме и поляризации.
Поэтому нами разрабатывается математический аппарат для решения
обратной задачи радиолокационного зондирования в электродинамической
постановке.
Основа метода заключается в получении решения прямой электродинамической задачи для достаточно
произвольной модели среды с изменяющейся диэлектрической проницаемостью
и проводимостью.
Далее, используя аппарат современного вариационного исчисления, реализуется стратегия
подгонки параметров среды с целью минимизации расхождения (невязки)
между смоделированным и наблюдаемым сигналом. Для обеспечения
сходимости итерационного процесса и единственности решения, минимизация
рассматривается в определенных классах сред. Результатом решения
обратной задачи является откорректированная модель среды (в выбранном
классе), для которой смоделированный отклик среды имеет минимальное
расхождение с наблюдаемым сигналом [7].
4. Опыт практической работы.
До мая 1998 г. работы по георадарному обследованию подповерхностных структур в интересах
заказчика носили эпизодический характер. В мае 1998 г., во время
нашумевшего события - подземного провала на улице Большая Дмитровка
в Москве, нам первым удалось получить геологическое сечение участка
провала и объяснить его причину.
Эти результаты были отмечены Московским правительством и с нами был заключен бессрочный
договор об обследовании территории Москвы. С этого момента практическая
работа по георадарному обследованию подземных структур носит регулярный
характер. Всего, менее чем за два года, обследовано 40 объектов,
связанных с провалами и строительством в условиях сложной системы
подземных коммуникаций.
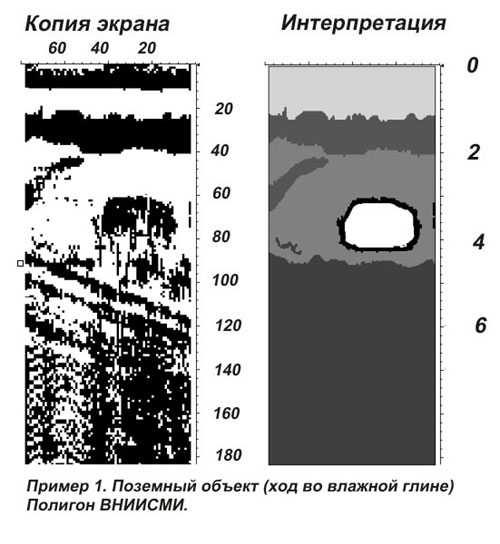
В качестве иллюстрации приведем три результата наших работ.
- Подземный объект (ход во влажной глине). Полигон ВНИИСМИ;
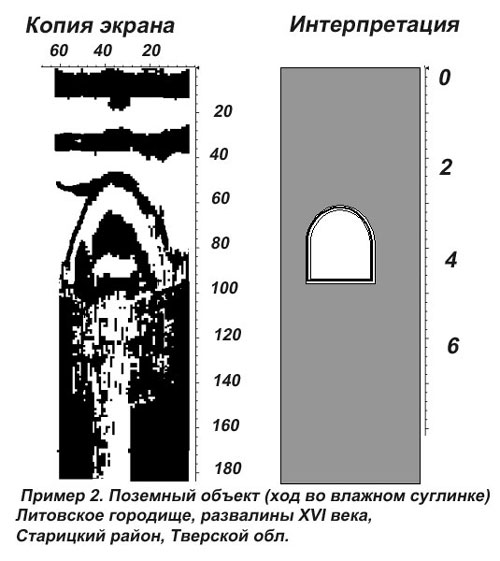
- Подземный объект (ход во влажном суглинке). Литовское городище, развалины
XVI века. Старицкий район Тверской области.
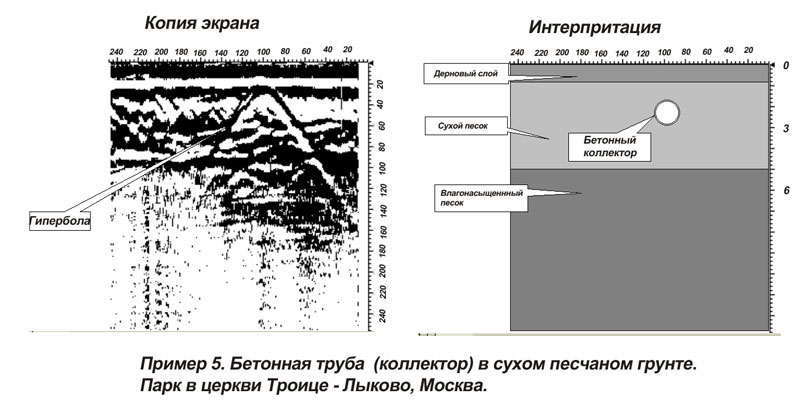
- Бетонная труба (коллектор) в сухом песчаном грунте. Парк в церкви Троице-Лыково, Москва.
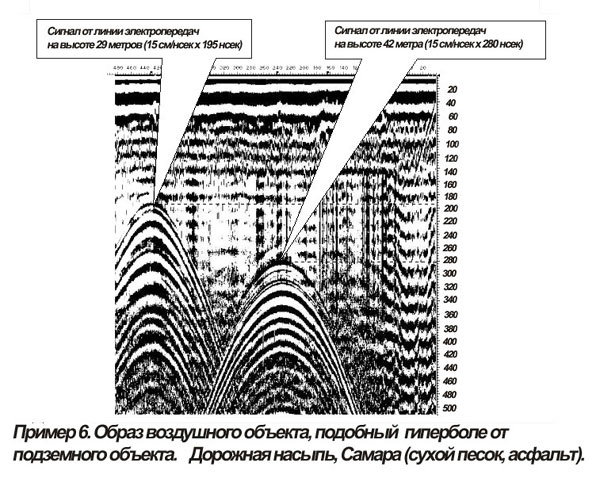
- Образ воздушного объекта, подобный гиперболе от подземного объекта.
Дорожная сыпь. Самара. Сухой песок, асфальт.
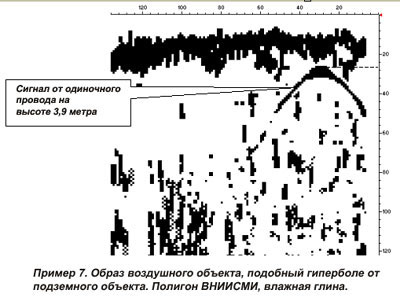
- Образ воздушного объекта, подобный гиперболе от подземного объекта.
Полигон ВНИИСМИ, влажная глина.
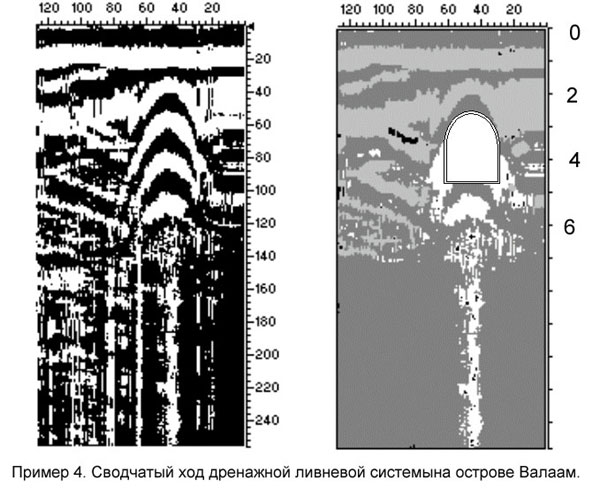
- Сводчатый ход дренажной ливневой системы на острове Валаам.
Заключение.
К настоящему времени мы имеем опыт работы в различных регионах России, включая Сибирь,
Якутию и Дальний Восток. Практические результаты показывают, что
реальный потенциал георадаров "Грот" достаточен для решения многих
задач в первых десяти метрах подповерхностного слоя даже в условиях
глинистых почв Подмосковья.
Однако существуют задачи зондирования на сотни метров, которые так же можно решать
с помощью радиолокационного метода. Для того, чтобы достичь таких
глубин, необходимы радары частотного диапазона 1 -50 МГц.
Мы ведем исследования в этой области, имеем лабораторные макеты таких радаров а так
же положительный практический опыт по зондированию геологических
структур глубже 100 м.
Одной из основных причин, препятствующих широкому распространению георадарных технологий,
является сложность интерпретации данных, требующая на современном
этапе привлечения высококвалифицированных специалистов. Выход
из этого положения заключается в создании математического аппарата
решения обратной задачи радиолокационного зондирования, которая
позволит минимизировать участие оператора в получении конечного
результата, а так же извлекать максимальное количество информации
из георадарных данных.
ЛИТЕРАТУРА
- М.И. Финкельштейн, В.Л. Мендельсон, В.А. Кутев. Радиолокация слоистых земных
покровов. М., Советское Радио, 1977, 174 с.
- S. Evans. Radio techniques for the measurement of ice thickness. Polar Rec.,
1963, 11, pp. 406-410.
- J.S. Cook. Radar transparencies of mine and tunnel rocks. Geophys., 1975, 40,
pp. 865-885.
- Подповерхностная радиолокация. Под ред. М.И. Финкельштейна. М., Радио и связь,
1994, 216 с.
- S.I. Klimov etc. On the use of a mobile surface radar to study the atmosphere
and ionosphere of Mars. Adv. Space Res. 1990, v.10, pp. 35-38.
- В.А. Гарбацевич, В.В. Копейкин, С.Е. Кюн, А.Ю. Щекотов. Устройство для радиолокационного
зондирования подстилающей поверхности. Патент РФ от 15 февраля 1994 г.
- A. Kerimov, V.Kopeikin. The inverse problem for GPR of impulse type via
optimal control theory. Proceedings of 7th International Conference
on GPR. Lawrence, 1998, v.1, pp. 309-312
наверх
|
|
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}